

LA PROCEDURE DE TEST EXEMPLES EN IMAGES
autre article en rapport avec le sujet: les niveaux RVB bruts et leur interprétation
 La dynamique réelle des capteurs, calage de la cellule et marge de surexposition
La dynamique réelle des capteurs, calage de la cellule et marge de surexposition
La dynamique des capteurs utilisés dans nos boîtiers numériques est directement liée à la qualité de la quantification, c'est à dire à la conversion du courant électrique issu d'un photosite en donnée numérique: cette tache est affectée à un convertisseur
analogique / numérique qui converti le courant électrique issu du photosite en donnée numérique. Sur les capteurs modernes, cette opération se fait en 14 bits, c'est à dire que l'échelle des valeurs possibles est de 2 soit de 0 à 16384. L'échelle est linéaire, à chaque fois que la quantité de lumière double, la valeur
numérique double.
La dynamique maximum théorique est donc de 14 diaphragmes puisque une valeur de diaphragme correspond à deux fois plus de lumière et que les échelles sont linéaires.
Mais cette valeur est théorique car les photosites ont un seuil de saturation ( la valeur maximale ) qui est variable et qui n'atteint pas la valeur maximale théorique. De plus le niveau de bruit
du capteur induit une valeur minimale qui n'est pas nulle. La dynamique réelle d'un capteur est donc plus faible que la dynamique théorique.
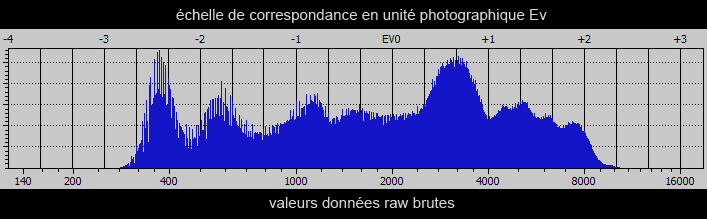
Ev 0 a été défini arbitrairement sur 2000 pour simplifier la lecture de ce graphique
nous voyons clairement qu'un doublement de la valeur brute ( chiffre du bas ) correspond à +1 Ev ( chiffre du haut )
Ev 0 se définit en fonction du réglage de la cellule de votre boîtier ( voir plus bas sur cette page )
La quantification linéaire pose un problème: le nombre
des valeurs affectées en fonction du niveau est variable et sur le graphique ci-dessous nous voyons clairement que pour une variation d'exposition d'un diaphragme, le nombre de valeurs intermédiaires n'est pas constant:
Pentax
645D,
capteur
en
14
bits

|
intervalle diaphragme |
valeurs RVB dans l'intervalle |
|
-4 Ev -3Ev |
125 |
|
-3 Ev -2 Ev |
250 |
|
-2 Ev -1 Ev |
500 |
|
-1 Ev 0 Ev |
1000 |
|
0 Ev +1 Ev |
2000 |
|
+1 Ev +2 Ev |
4000 |
|
+2 Ev +3 Ev |
8000 |
La qualité de la quantification est donc largement meilleure dans les hautes lumières que dans les ombres, en effet, plus il y a de valeurs disponibles pour la quantification et meilleure sera la restitution des fines variations de teinte ou de luminance de la scène photographiée.
Si on ajoute à cela le niveau de bruit du capteur, il est clair qu'il est vivement recommandé " d'exposer à droite " c'est à dire d'exposer ses prises de vues de manière à ce que l'histogramme se situe le plus possible sur la droite sans pour autant écrêter les hautes lumières.
Il paraît donc évident qu'il est indispensable de déterminer avec précision la plage dynamique réelle du capteur utilisé: en connaissant précisément son seuil de saturation nous pourrons " exposer à droite " en tenant compte de la valeur maximum de surexposition possible et donc sans risque d'écrêter les hautes lumières.
La procédure de test
Le boîtier utilisé pour ce test est le Pentax 645D réglé sur iso100, en suivant la même procédure que sur cette page vous pourrez réaliser ce test avec votre propre matériel, afin de définir les valeurs réelles pour votre matériel.
La procédure pour déterminer ces valeurs est assez simple: nous utiliserons le logiciel Raw Digger ( voir ici ) qui permet l'analyse des données RVB brutes contenues dans les fichiers raw, nous allons faire 3 prises de vues d'une mire CMP Refcard White:
- La première prise de vue sera largement surexposée ( plus de 10 diaphragmes de surexposition ), elle nous permettra de déterminer le seuil de saturation des photosites.
- La seconde prise de vue sera effectuée sur cette même mire mais en suivant les indications de la cellule du boîtier, elle sera donc à l'exposition nominale indiquée par la cellule soit Ev 0, elle nous permettra de déterminer le calage de la cellule par rapport au seuil de saturation du capteur,
- La troisième prise de vue sera effectuée avec le bouchon de l'objectif et un temps d'exposition très court, elle permettra d'obtenir un noir pur et donc de déterminer le niveau de bruit du capteur à la sensibilité sélectionnée.
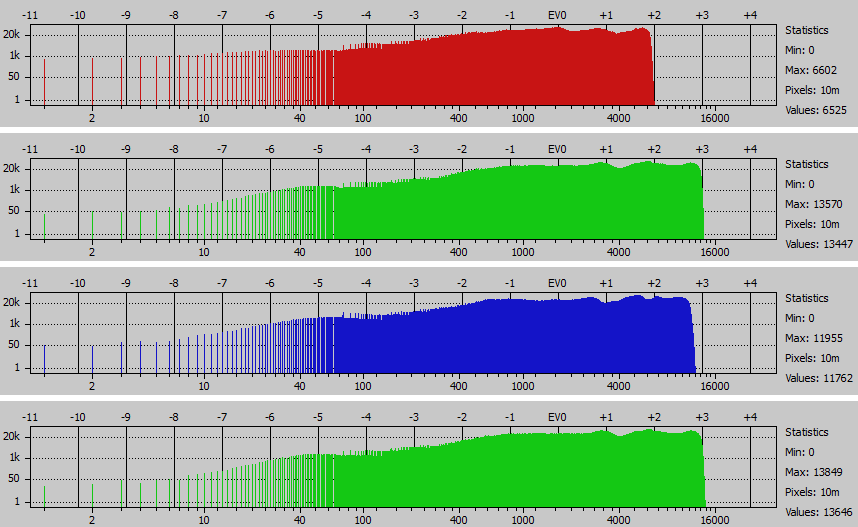
Prise de vue n°1: surexposition +10 diaphragmes
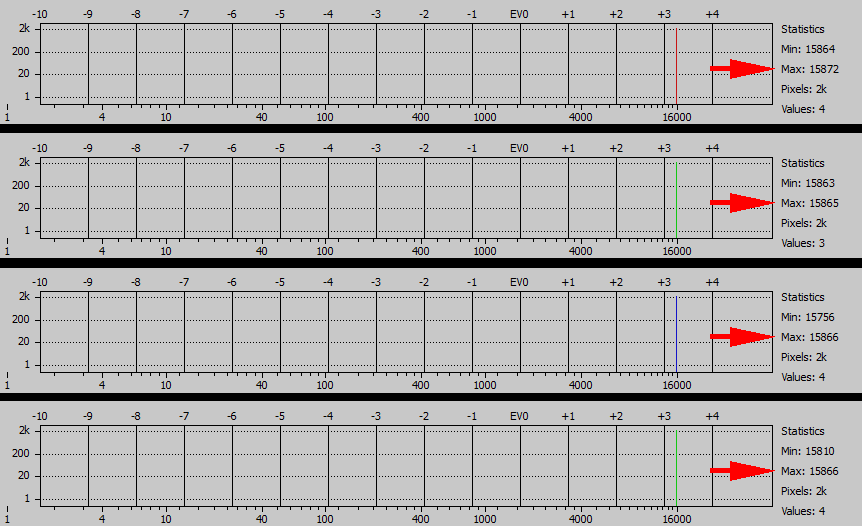
Données raw brutes, pentax 645D, ISO 100, surexposition de 10 diaphragmes sur un blanc de référence
Sans surprise, cette vue largement surexposée ( + 10 diaphragmes par rapport à la mesure cellule ) nous donne un histogramme raw brut sous la forme de " traits verticaux " puisque tous les pixels sont à leur seuil de saturation soit à leur valeur maximale possible.
Les valeurs RVB raw brutes maximales ( qui correspondent au seuil de saturation des photosites ) pour les différents canaux sont donc:
- canal rouge : 15872
- canal vert 1: 15865
- canal bleu: 15866
- canal vert 2: 15866
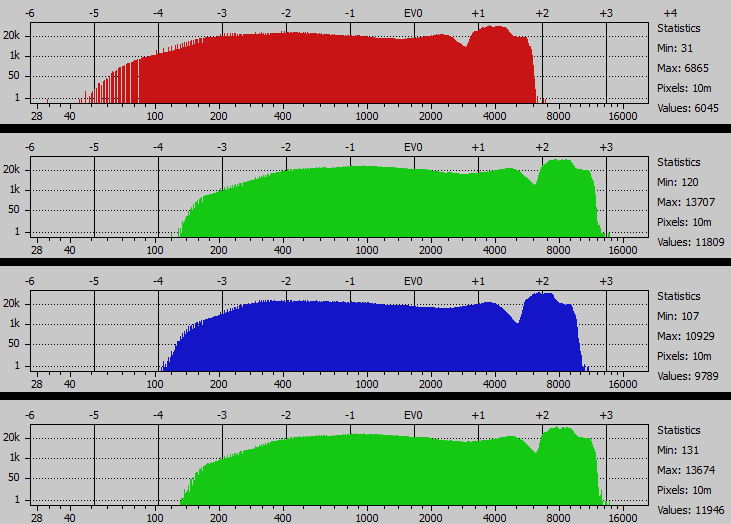
Prise de vue n°2: exposition nominale Ev0
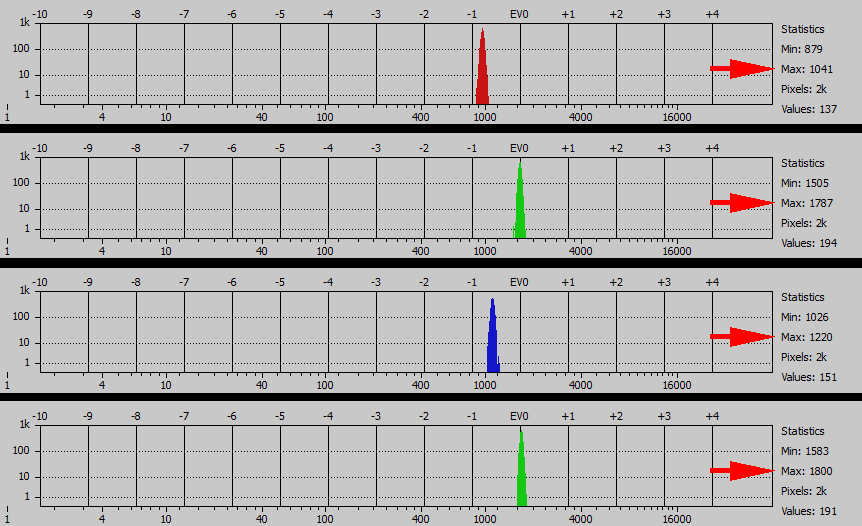
Données raw brutes, pentax 645D, ISO 100, exposition nominale sur un blanc de référence
Sur cette vue l'exposition nominale donnée par la cellule a été suivie, les 4 canaux présentent des valeurs moyennes différentes malgré une balance des blancs effectuée manuellement sur le blanc de la mire. En effet, en raw la valeur de balance
des blancs est indicative et ne modifie en rien les valeurs RVB raw brutes enregistrées: la valeur de balance des blancs elle est encapsulée dans l'exif de l'image et sera utilisée ultérieurement lors du développement du fichier.
Cette différence de niveau entre les différents canaux vient du fait que le filtrage RVB de la mosaïque de bayer est "
photovore " et que le filtrage vert absorbe moins de lumière que les filtrages rouge et bleu. La différence de filtrage n'est pas négligeable puisqu'il y a presque 2/3
de diaphragme entre les canaux verts et rouge/bleu, le filtrage rouge étant le plus pénalisant quant à la quantité de lumière non transmise par le filtre.
Ces valeurs ( histogramme ci-dessus ) sont le reflet du calage de la cellule: toute mesure non corrigée tendra vers ces valeurs qui représente donc Ev 0.
En numérique il est couramment admis que les constructeurs de boîtier calent leurs cellules à 3 diaphragmes en dessous du seuil de saturation, contrairement à l'argentique oû les cellules étaient calées sur un gris à 18% de réflectance, en numérique la donne change et le calage se fait " par le haut " , d'ou les problèmes de sous-exposition quand on utilise un gris standard à 18% pour faire sa mesure de lumière en numérique !
Les valeurs RVB raw brutes moyennes qui correspondent au calage de la cellule du boîtier ( soit Ev 0 ) pour les différents canaux sont donc:
- canal rouge : 960 ( 879+1041 / 2 )
- canal vert 1: 1649 ( 1505+1787 /2 )
- canal bleu: 1123 ( 1026+1220 /2 )
- canal vert 2: 1691 ( 1583+1800 /2 )
Prise de vue n°3: sous-exposition totale, noir pur
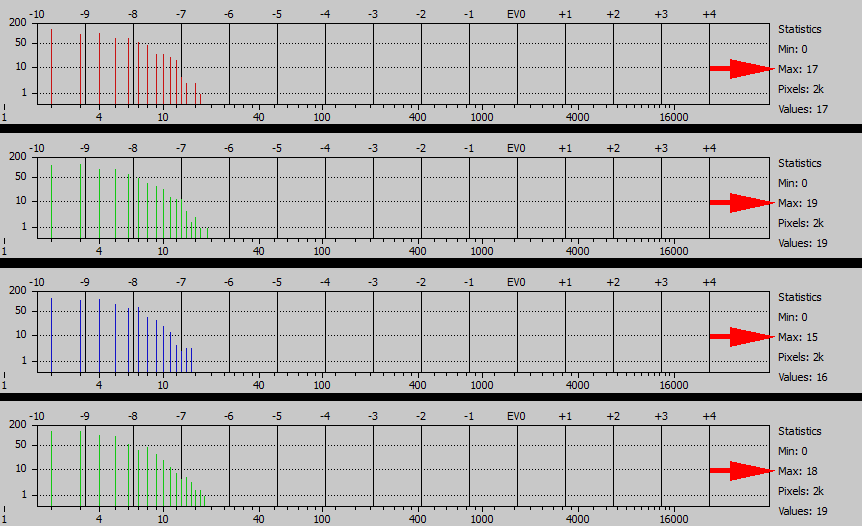
Données raw brutes, pentax 645D, ISO 100, sous exposition maximale dans le but d'obtenir un noir pur
Cette vue réalisée à 100 ISO avec le bouchon d'objectif et une vitesse d'obturation rapide devrait théoriquement présenter un histogramme sous la forme d'un " trait " situé à 0 pour les 4 canaux. Le nuage de points montre qu'il n'en est rien et nous pouvons visualiser ici le bruit de fond généré par le capteur: même en absence de lumière les photosites génèrent un courant electrique résiduel qui est échantillonné et restitué dans le noir profond des images.
Les valeurs RVB raw brutes minimales qui seront suffisamment hautes pour être différenciées du bruit de fond sont donc:
- canal rouge : 17
- canal vert 1: 19
- canal bleu: 15
- canal vert 2: 18
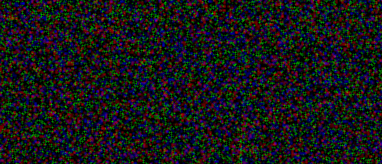
bruit résiduel dans le noir pur
niveaux artificiellement remontés pour une meilleure visualisation
A partir de ces valeurs nous pouvons calculer assez simplement la dynamique réelle du capteur,
c'est à dire quelle sera la plage d'utilisation entre le noir le plus profond différencié du bruit de fond du capteur et la valeur la plus
haute enregistrable par le capteur.
Nous pouvons aussi calculer la marge réelle de surexposition à partir de l'indication de la cellule du boîtier, cette valeur sera utilisée lors des prises de
vues pour déterminer l'exposition optimale des hautes lumières en utilisant le bargraph de la cellule dans le viseur.
Dernière valeur que
nous pouvons calculer: la marge de sous-exposition par rapport à l'indication de la cellule: cette valeur pourra être utilisée lors des prises de vues pour déterminer
si les ombres seront ou non correctement restituées sur le fichier raw, c'est à dire si elles seront enregistrées à un niveau supérieur au bruit
de fond généré par le capteur.
Nous utilisons une formule simple pour calculer la dynamique entre 2 valeurs RVB : pour 2 valeurs A et B nous pouvons calculer leur écart en Ev avec la formule suivante:
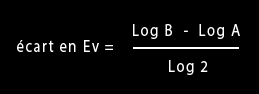
Attention B est la valeur la plus grande et A la plus petite, cette formule n'est valable que sur une échelle linéaire, si vous voulez faire vos propres tests vous devrez utiliser les valeurs RVB données par le logiciel Raw Digger, si vous utilisez cette formule sur des données RVB converties dans un espace non linéaire comme les espaces couleurs courants les résultats obtenus seront faux.
|
|
mesures revelées |
données calculées |
||||
|
canaux |
seuil de bruit du capteur |
Ev 0 mesure cellule |
seuil de saturation des photosites |
dynamique réelle du capteur |
marge surexposition |
marge sousexposition |
|
rouge |
17 |
960 |
15872 |
9.86 Ev |
+ 4.04 Ev |
- 5.82 Ev |
|
vert 1 |
19 |
1649 |
15865 |
9.70 Ev |
+ 3.26 Ev |
- 6.44 Ev |
|
bleu |
15 |
1123 |
15866 |
10.04 Ev |
+ 3.82 Ev |
- 6.22 Ev |
|
vert 2 |
18 |
1691 |
15866 |
9.78 Ev |
+ 3.22 Ev |
- 6.56 Ev |
Nous pouvons donc voir que la dynamique réelle du capteur du Pentax 645D est variable selon les couches et qu'elle se situe entre 9.70 et 10.04 Ev ( calcul avec A= seuil de bruit de fond et B= seuil de saturation ):
|
canaux |
dynamique réelle du capteur |
|
rouge |
9.86 Ev |
|
vert 1 |
9.70 Ev |
|
bleu |
10.04 Ev |
|
vert 2 |
9.78 Ev |
La marge de surexposition est entre 4.04 et 3.22 Ev ( selon les couches ), ces valeurs constituent donc la marge de surexposition que nous avons avant écrêtage par rapport aux indications de la cellule du boîtier. Ces valeurs sont importantes car lors de prises de vues, une mesure SPOT sur les plus hautes lumières de la scène photographiées permettra de dire avec certitude si les hautes lumières seront écrêtées ou non. ( calcul avec A= Ev 0 et B= seuil de saturation ):
|
canaux |
marge de surexposition |
|
rouge |
+ 4.04 Ev |
|
vert 1 |
+3.26 Ev |
|
bleu |
+ 3.82 Ev |
|
vert 2 |
+ 3.22 Ev |
La marge de sous-exposition représente la sous exposition maximale possible par rapport à Ev 0 tout en restant distinct du niveau de bruit du capteur. ( calcul avec A= seuil de bruit de fond et B= Ev 0 )
|
canaux |
marge de sous-exposition |
|
rouge |
- 5.82 Ev |
|
vert 1 |
-6.44 Ev |
|
bleu |
- 6.22 Ev |
|
vert 2 |
-6.56 Ev |
la gamme de mires de calibrage CMP
Exemple en image et application en prise de vue réelle
|
Les boîtiers numériques possèdent pour la plupart plusieurs modes de mesure de la lumière, personnellement je n'utilise que la mesure SPOT en mode MANUEL: cela me permet de contrôler la dynamique de la scène photographiée en effectuant un balayage sur les points remarquables: les hautes et basses lumières sont ainsi évaluées de façon précise et affichées par le bargraph de la cellule dans le viseur. Si vous en avez la possibilité sur votre boîtier: mesure SPOT et cellule en mode MANUEL choisissez votre diaphragme en fonction du sujet et ajustez la vitesse en fonction des indications du bargraph de la cellule pour que les plus hautes lumières flirtent avec la limite maximale ( en général autour de +3 Ev ) |
La connaissance de la dynamique réelle de votre capteur et du calage de votre celllule permet d'exposer vos images plus finement et d'assurer un rendu correct des hautes lumières: en mesure spot, balayez la scène photographiée et trouvez la zone comportant les plus hautes lumières. Selon les résultats des précédents tests effectués sur votre matériel, réglez le couple vitesse / diaphragme pour que les plus hautes lumières soient à la limite du seuil de saturation.
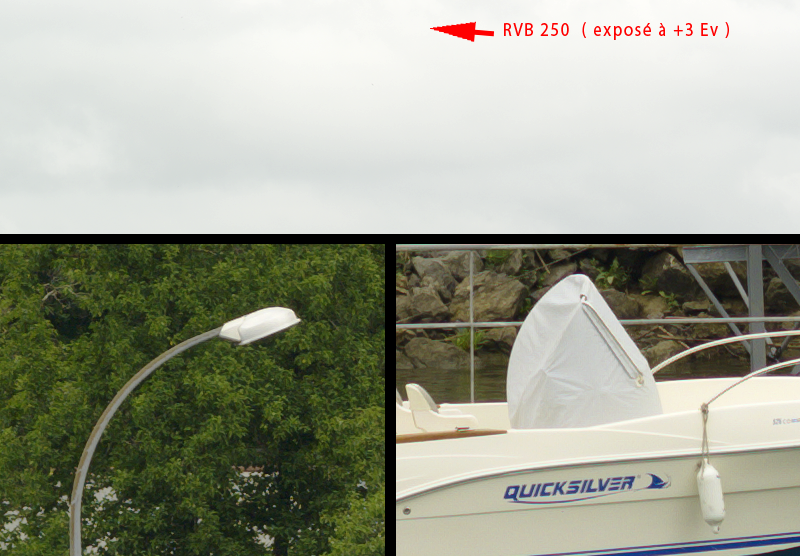
La prise de vue ci-dessous ne présente pas de difficulté particulière, mais le ciel couvert très lumineux occupe près d'un tiers de l'image et peut très facilement tromper la cellule ( en mode de mesure automatique ) en entraînant une sous-exposition. Placer le blanc le plus lumineux du ciel à +3 Ev permet de caler son exposition " par le haut " en étant certain qu'aucune donnée des hautes lumières ne sera écrêtée ( nous avons déterminé plus haut sur cette page que le Pentax 645D possède une marge minimum de surexposition de 3.22 Ev ).

image dans l'espace adobe RGB 98
utilisez un navigateur qui gère les espaces couleur ( firefox par exemple )
fichier raw développé dans Camera Raw avec profil DNG sur mesure, rendu CMP
Cette valeur de +3 Ev pour les plus hautes lumières laisse une petite marge de 0.2 Ev par rapport à la valeur maximale du canal vert 2 ( max : +3.22 Ev ). Si les autres canaux peuvent encaisser une plus grande surexposition ( jusqu'à +4.04 Ev sur le canal rouge ), dans le cas présent la couleur échantillonnée ici étant blanche nous sommes limités par la plus petite valeur des différents canaux.
détails à 100%, les hautes lumières restent détaillées, avec un rendu naturel
fichier raw développé dans Camera Raw avec profil DNG sur mesure, rendu CMP
Autre exemple avec l'image ci-dessous réalisée au Maroc, après le couché du soleil. Le principe est le même: exposer le plus possible à droite pour conserver une qualité d'image optimale dans les ombres tout en conservant un ciel correctement exposé.
J'ai choisi d'exposer les plus hautes lumières ( la partie haute du ciel ) à + 2 2/3 Ev pour conserver la couleur du ciel qui n'est pas totalement blanche. La gamme de ton sur cette image est complète avec de très hautes et très basses lumières et cette méthode d'exposition permet un rendu correct et réaliste de tous les éléments.

fichier raw développé dans Camera Raw avec profil DNG sur mesure, rendu CMP
passez votre souris sur l'image pour visualiser le rendu final optimisé
image dans l'espace adobe RGB 98, utilisez un navigateur qui gère les espaces couleur ( firefox par exemple )
histogramme des données raw de l'image ci-dessus

détail à 100% - zone d'ombre sur la barque rouge au premier plan
fichier raw développé dans Camera Raw avec profil DNG sur mesure, rendu CMP

détail à 100% - centre de l'image
fichier raw développé dans Camera Raw avec profil DNG sur mesure, rendu CMP
autre article en rapport avec le sujet: les niveaux RVB bruts et leur interprétation

article écrit en juillet 2012
Copyright (c) 2018 christophe metairie photographie - Tous droits reserves